This is the model code associated with the paper:
Crevecoeur F, Scott SH, Cluff T (2019) Robust control in human reaching movements: a model-free strategy to compensate for unpredictable disturbances. J Neurosci
http://dx.doi.org/10.1523/JNEUROSCI.0770-19.2019
This MATLAB code was contributed by F. Crevecoeur.
To run enter the program name
script_minmax_pointMass
on the matlab command prompt. After a short while a figure related to figure 1 in the paper will appear:
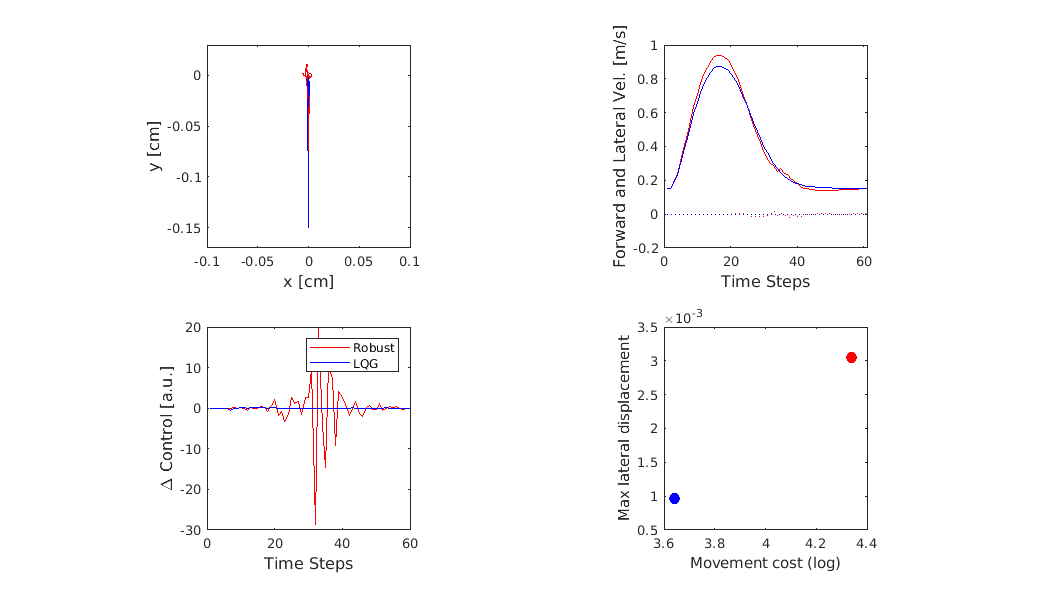 In the figure of the paper we display simulation with and without lateral perturbations, which is encoded with a parameter “load” in the script. The screenshot is for simulations without perturbation (only noise).
In the paper, we show 5 or 10 simulations and then averaged some parameters (like the cost computed at each run) across 100 or so. As is the routine does not automatically compute averages across several simulations.
Please contact F Crevecoeur for any questions.
20190924 readme updated with additional information from F
Crevecoeur and default screenshot provided.
In the figure of the paper we display simulation with and without lateral perturbations, which is encoded with a parameter “load” in the script. The screenshot is for simulations without perturbation (only noise).
In the paper, we show 5 or 10 simulations and then averaged some parameters (like the cost computed at each run) across 100 or so. As is the routine does not automatically compute averages across several simulations.
Please contact F Crevecoeur for any questions.
20190924 readme updated with additional information from F
Crevecoeur and default screenshot provided.